
About Me
👋 Hi there! I am Yiyan (Harry) Peng, and I am a first-year Master of Science in Computer Engineering student at the Northwestern University.
Previously, I finished my undergraduate study at the Hong Kong University of Science and Technology (HKUST) from the Department of Electronic and Computer Engineering (ECE). I was fortunate to be advised by Prof. Jun Zhang and Dr. Albert Kai-Sun Wong.
My research interests include the intersection of AI and robotics (particularly embodied AI in the topics of vision-language-action models, robotic perception and manipulation, and also the applications of AI in healthcare). I am eager to learn more and take on challenging projects and research opportunities, with passion for making robots’ intelligence more tangible and accessible to people by merging AI and robotics to genuinely benefit our society.
Projects
(Ongoing project for humanoid loco-manipulation tasks)
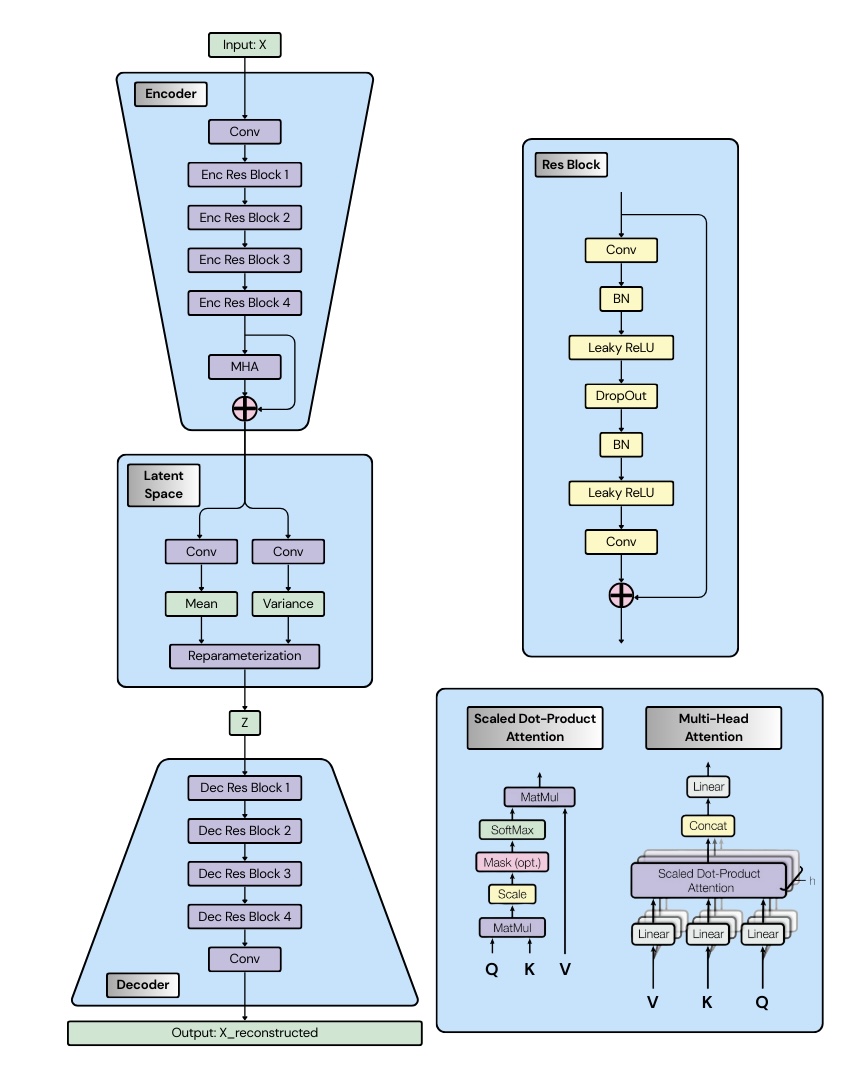
Designed and implemented a hybrid VAE-LSTM-MHA model for time-series forecasting and anomaly detection in noisy patient respiration data, achieving over 95% detection accuracy and improving reconstruction quality — especially on multi-modal inputs — by at least 10% over the baseline VAE-LSTM architecture. Constructed a low-latency wireless communication system using ESP-NOW protocols achieving sustained end-to-end latency under 50ms to ensure robust peer-to-peer connectivity and minimal protocol overhead.
Implemented LiDAR-based SLAM with ICP alignment, A* path planning, Bezier-curve trajectory generation, and PID control to achieve frontier-based autonomous UGV navigation and exploration.
Implemented real-time trajectory planning for quadrotors, including tuning PID controller, minimum-snap trajectory generation and obstacle-aware path planning (A*, Dijkstra), to achieve smooth and safe autonomous navigation. Developed vision-based localization and state estimation pipelines: applied PnP pose estimation, stereo visual odometry, and fused IMU & vision data via augmented-state EKF, and validated in simulation and real-world flight tests.
Developed and programmed an autonomous driving framework for a fast robot car from scratch, with sensing (multi-sensor fusion), localization (Bayes filter-based localization), environment mapping, control (PID), path planning, and navigation on a microcontroller board (SparkFun RedBoard Artemis Nano).
Education
- M.S. in Computer Engineering, Northwestern University, Sep 2025 - May 2027 (Expected)
- B.Eng. in Electronic Engineering, HKUST, Sep 2021 - May 2025
- Non-Degree Exchange in Electrical and Computer Engineering, Cornell University, Jan 2024 - May 2024
Others
- Posts : I will post some of my study notes here occasionally, for different topics.